人工衛星追尾システム
Table of Contents
1 概要
はるか遠くの宇宙空間を飛び回っている人工衛星からの微弱な信号を受信し復調するためにはそれなりの利得を持つアンテナを用いる必要があります. 高利得なアンテナは当然鋭い指向性を持つため常に移動し続ける衛星の方向に狙いを定めなくてはいけません. そこで既存の軌道計算ソフトウェアと組み合わせて使用する人工衛星追尾システムを製作しました.
2 軌道計算ソフトウェア
今回は人工衛星の軌道を計算するためのソフトウェアとして広く用いられているOrbitronを用いました. Orbitronの詳しい説明は他サイトに譲りますがこのソフトウェアを用いることで宇宙空間を飛び回っている衛星の軌道を計算し追尾システムに必要な情報を得ることができます.
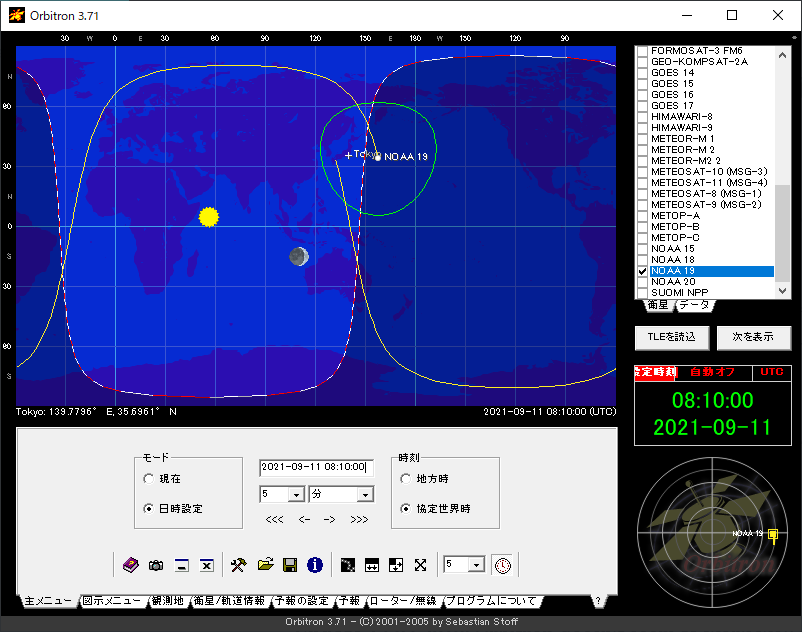
またOrbitronから出力される追尾情報をシリアル通信でマイコンに伝えるためにDDEOrbitronToSerialを用いました.
3 ハードウェア
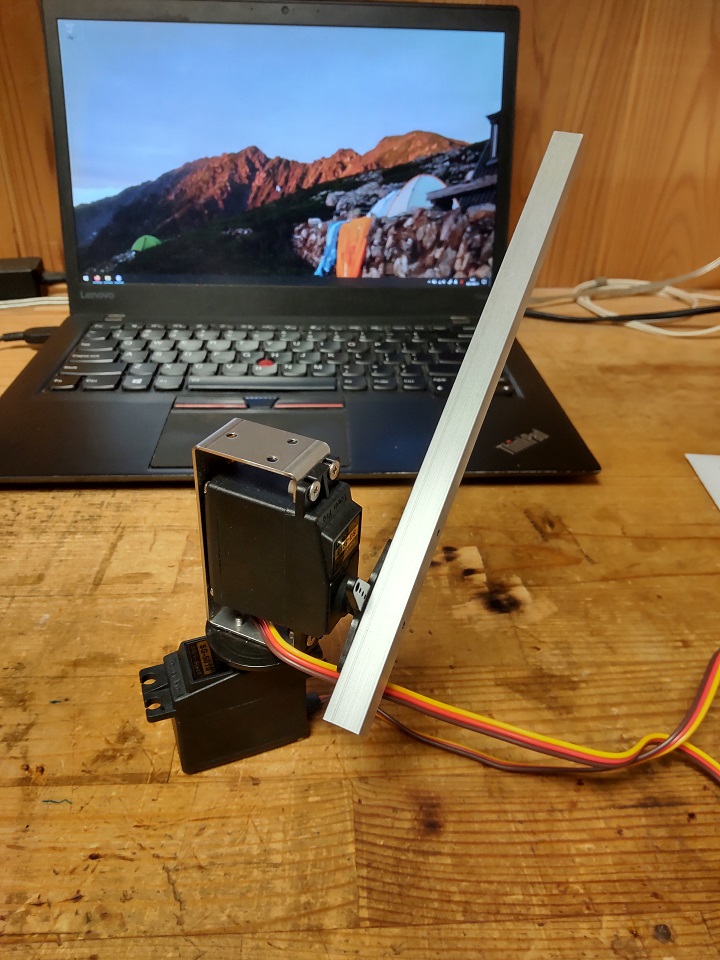
今回は市販のRCサーボを2個利用しAzimuth(方位角)とElevation(仰角)の2軸を制御できるようにしました. サーボモータの稼動域は180°ですが方位角の追尾は360°,仰角は90°であるため方位角が180°を越える場合は仰角90°を越して架台を反転させることで対応しました. 今回使用したサーボモータ架台は以前頭を撫でてくれるロボットを作ったときのものを流用しています.
制御にはArduino UNOを利用し,D9に方位角,D10に仰角方向のサーボを接続します. Arduinoのスケッチはこちら.
4 動作
こんな感じです.
極軌道衛星を連続追尾するとこんな感じ(タイムラプス) pic.twitter.com/KL4jGG1Hny
— うっしー JJ1HKL (@Kumagoro_Ushi) September 10, 2021